 在底特律举行的SAE WCX17全球汽车年会上,Mentor公司的DRS360正式发布。该模组的主要应用场景为5级自动汽车,但也可用于支持ADAS。DRS360模组的硬件组成包括赛灵(Xilinx)的现场可编程门阵列(FPGA),及一些基于X86或ARM架构的微控制器。软件则主要基于公司行业领先的汽车Linux平台,需运行Linux软件。
在底特律举行的SAE WCX17全球汽车年会上,Mentor公司的DRS360正式发布。该模组的主要应用场景为5级自动汽车,但也可用于支持ADAS。DRS360模组的硬件组成包括赛灵(Xilinx)的现场可编程门阵列(FPGA),及一些基于X86或ARM架构的微控制器。软件则主要基于公司行业领先的汽车Linux平台,需运行Linux软件。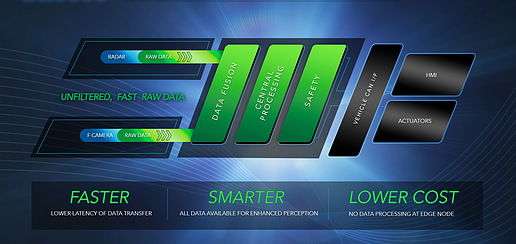 与当今流行的分布式处理器架构相比,Mentor的模组采用了一款强大的中央处理器。
与当今流行的分布式处理器架构相比,Mentor的模组采用了一款强大的中央处理器。
如今,越来越多的公司开始前仆后继地涌入自动驾驶汽车领域,渴望能在这个生机勃勃的市场中分一杯羹。Mentor Graphics公司的嵌入式系统部门也不例外,这家公司推出了一款自动驾驶模组,可直接利用传感器的原始数据,做出驾驶决策。
Mentor公司的这个最新平台能够捕捉并融合来自雷达、激光雷达、视觉传感器等系统的原始数据输入,而后判断车辆是否需要做出转弯、制动等动作。在底特律举行的SAE 2017 全球汽车年会(WCX17)上,Mentor公司的DRS360模组正式发布。该模组的主要应用场景为SAE Level 5自动驾驶汽车,但也可用于支持ADAS。
DRS360模组的硬件组成包括赛灵(Xilinx)的现场可编程门阵列(FPGA),及一些基于X86或ARM架构的微控制器。软件则主要基于公司行业领先的汽车Linux平台,需运行Linux软件。
与许多安全系统不同,Mentor的DRS360模组可直接使用传感器的原始数据。一般来说,绝大部分公司都会为传感器配置微控制器,在数据进入汽车系统之前对其进行一些基础的处理,从而降低传感器对带宽需求,并减轻中央处理模组的工作负担。
Mentor公司的工程师认为,考虑到像以太网等网络可以满足绝大多数高分辨率传感器的带宽要求,因此直接使用原始数据是个更加高效的选择。摒弃在传感器内安装运算模组的设计,可以同时节约时间和成本,对于满载各种传感器的自动驾驶汽车来说更是如此。
“在自适应巡航控制系统中,车辆雷达配置了一个处理器。该处理器会先对数据进行筛选,而后将重要部分传入车辆系统,并供后者判断车辆是否需要采取刹车等行动。”Mentor Graphics公司嵌入式系统部门总经理Glenn Perry表示,“在传感器中增加处理器的设计会带来延迟,需要使用的材料种类自然也更多。考虑到SAELevel 5自动驾驶汽车所装载的大量激光雷达、雷达及摄像头,这种作法会给汽车厂商带来沉重的成本压力,并造成巨大的计算负担,因此可能行不通。”
DRS360模组的功率不到100 W。在最近进行的测试中,我们发现,当设备采用的传感器越多,这款模组的性能优化效果就越明显。技术人员在运行“行人、自行车、汽车”目标分类算法时使用了一个单独传感器,而后又增加了更多传感器输入。当一组传感器的输入相互融合后,系统分析数据所需的计算能力降低了。
“当采用一个传感器时,我们的CPU负载在85%左右,完成目标分类大约需要600ms,置信度为65%。”Perry说,“当我们增加雷达和激光雷达的数量时,系统的置信水平有所提高,而CPU负载却下降至55%,分类时间仅为1ms。”
Perry指出,“我们很惊讶地看到,当CPU需要处理的数据更多时,其数据传输量反而下降了,这是违反常理的。”
事实上,性能并非各家厂商决定是否购买Mentor模组的唯一理由,一级供应商及各厂商集团所处的商业环境也将发挥关键作用。
与当今流行的分布式处理器架构相比,Mentor的模组采用了一款强大的中央处理器。很多自动驾驶架构也采用了中央控制器,而这均非常依赖预处理数据输入。Mentor公司ADAS部总监AminKashi认为,公司的购买决定主要是从商业方面考虑,而非技术。
“从组织结构和供应链方面考虑,目前行业似乎对‘整合’的概念有所抵触。”Kashi表示,“也就是说,市场上有一些信息娱乐设备在与车内相关系统的整合时,根本没有考虑太多结构的问题,特别是一些中国厂商尤其如此。”
开放性也是DRS360的另一个商业加分点。一些供应商仅能向客户提供黑盒解决方案,因此客户很难改变其中的硬件或软件。Mentor则允许厂商根据需要,自行调整模组的算法和硬件设计。
Perry表示,“很多厂商均视ADAS为各家公司拉开差距的地方,但如果他们都只能拿到同一个黑盒解决方案,就很难真正拉开差距。而我们提供的开放平台则允许他们根据公司需要,进行一些定制处理,真正让他们的产品脱颖而出。”
The race to gain a foothold in the emerging autonomous vehicle market continues to attract more players. Mentor Graphics Embedded Systems Division is joining the game, introducing a system that captures raw sensor data and makes driving decisions.
Mentor’s new platform captures and fuses raw data from radar, lidar, vision and other sensors, then decides whether to turn, brake or take other actions. The DRS360, unveiled at the SAE WCX17 in Detroit, is aimed primarily at SAE Level 5 autonomous vehicles, though it can also be used for advanced driver assistance systems (ADAS).
The hardware includes Xilinx FPGAs Mentor and either X86- or ARM-based microcontrollers. It runs Linux software, building upon the company’s claims of leadership in automotive Linux.
Unlike many safety systems, Mentor is using raw sensor data. Many companies add microcontrollers to sensors, doing elementary processing before data goes onto the network. That reduces bandwidth requirements and lightens the workload for the central processing modules.
Mentor engineers contend that it’s more efficient to stream raw data, since networks like Ethernet can meet even the demands of many high-resolution sensors. Eliminating intelligence within sensors can save both time and money, especially in sensor-laden autonomous vehicles.
“In adaptive cruise control, the radar has a processor that filters out data; the important data is then sent to a system that decides whether it needs to brake,” explained Glenn Perry, General Manager of the Mentor Graphics Embedded Systems Division. “Adding a processor in the sensor induces latency and adds to the bill of materials. When you have all the lidar, radar, cameras needed for Level 5, I’m not sure this works. It will be expensive and consume an extraordinary amount of compute power.”
The Mentor module, which has a power budget of under 100W, actually improved performance in a recent test in which more sensors were added. Technicians used a single sensor when they ran object classification algorithm with a pedestrian, bicycle and vehicle, then added more sensor inputs. When input from complementary sensors was combined, it took less compute power to analyze the data.
“With one sensor, we were at an 85% CPU load with a classification time of about 600 milliseconds and a confidence rating of 65%,” Perry said. “When we added radar and lidar, the confidence level rose, the CPU load went down to 55% and the classification time was one millisecond.
"We were surprised how much the CPU load dropped; it was counterintuitive to stream in more Gbits of data and see a decline,” ne noted.
Performance won’t be the only factor that determines whether companies buy into Mentor’s concept. Business issues driven by Tier 1s as well as OEM groups will play a key role.
Mentor’s architecture utilizes a powerful centralized computer, in contrast to today’s distributed-intelligence architectures. Many autonomous architectures also employ a centralized controller that relies heavily on pre-processed inputs. Amin Kashi, Mentor’s ADAS Director, contends that this is driven by business rationales, not technical efficiency
“There’s been a resistance to consolidation, more due to organizational structures and supply chain issues,” Kashi said. “That said, there’s been some consolidation in infotainment and in-vehicle infotainment systems, especially by the Chinese, who don’t care much about structures.”
Openness is another plus on the business side. Some suppliers offer only a black box, so it’s difficult to alter hardware or software. Mentor will let OEMs tweak algorithms and hardware designs.
“OEMs feel ADAS is an area of differentiation, but if they can only get a black box, it’s difficult to differentiate. With an open platform, they can make alterations to differentiate their offerings,” Perry said.
Author: Terry Costlow
Source: SAE Automotive Engineering Magazine
等级
打分
- 2分
- 4分
- 6分
- 8分
- 10分
平均分